





Производитель роботов для очистки водных объектов
За последние несколько лет наблюдается заметный интерес к автоматизации процессов очистки водных ресурсов. Многие начинают думать о создании автономных систем, способных самостоятельно отслеживать и устранять загрязнения. Но, честно говоря, путь от концепции до работающего прототипа – это не просто инженерная задача, а сложный комплекс проблем, требующих глубокого понимания как технических аспектов, так и специфики конкретных водоемов. Речь не только о разработке робота, а о создании целой экосистемы, включающей в себя сенсоры, алгоритмы, систему навигации и, что немаловажно, механику для эффективного сбора и удаления загрязнений. Простые решения здесь, как правило, оказываются неработоспособными, а дорогостоящие – не всегда оправданными.
Проблемы и вызовы производителей роботов для очистки водных объектов
Первое, с чем сталкиваешься – это разнообразие задач. Очистка пруда отличается от очистки реки, а очистка сточных вод из промышленного предприятия требует совершенно иных подходов. Простое перемещение по поверхности воды – это только вершина айсберга. Необходимо учитывать глубину, течения, наличие растительности, мусора и других препятствий. Мы, в своей практике, часто сталкиваемся с ситуацией, когда идеально работающий в лаборатории прототип оказывается совершенно бесполезным на реальном водоеме. Это связано с недооценкой динамики окружающей среды и сложности адаптации алгоритмов к непредсказуемым условиям.
Еще один важный аспект – это энергоэффективность. Автономные роботы должны работать длительное время без подзарядки или замены батарей. Это требует оптимизации энергопотребления на всех этапах – от движения до работы сенсоров и механизмов очистки. В последнее время активно используются солнечные панели, но их эффективность сильно зависит от погодных условий и угла падения солнечных лучей. Мы разрабатывали роботов, использующих гибридные источники питания – солнечные панели в сочетании с аккумуляторами и даже небольшими ветряными турбинами, но это значительно увеличивает сложность и стоимость устройства.
И, конечно, не стоит забывать о безопасности. Робот должен быть устойчивым к механическим повреждениям, не выделять вредных веществ в воду и не представлять угрозы для флоры и фауны водоема. Разработка надежной системы защиты от коррозии – это отдельная сложная задача, особенно если робот будет эксплуатироваться в агрессивных средах. Мы применяем различные материалы – от нержавеющей стали до специальных полимеров, но каждый из них имеет свои ограничения и требует тщательного выбора.
Датчики и сенсоры: ключ к эффективной очистке
Эффективность работы любого робота для очистки водных объектов напрямую зависит от точности и надежности датчиков и сенсоров. Какие данные мы должны получать? В первую очередь – это данные о концентрации загрязняющих веществ (например, тяжелых металлов, органических веществ, бактерий). Для этого используются различные типы датчиков – оптические, электрохимические, ультразвуковые. Но просто собрать данные – это еще полдела. Необходимо разработать алгоритмы, которые будут интерпретировать эти данные и принимать решения о дальнейших действиях робота.
В последнее время активно используются методы машинного обучения для анализа данных, полученных с датчиков. Это позволяет роботу не только идентифицировать тип загрязнения, но и прогнозировать его распространение и эффективность различных методов очистки. Например, мы разрабатываем систему, которая использует нейронную сеть для определения оптимального маршрута робота по водоему с учетом текущей концентрации загрязнений и наличия препятствий. В процессе разработки мы столкнулись с проблемой недостатка обучающих данных – для обучения нейронной сети требуется огромный объем данных, собранных в различных условиях. Это потребовало создания собственной инфраструктуры для сбора и обработки данных, а также активного сотрудничества с научными институтами.
Механизмы очистки: от фильтрации до биоремедиации
Выбор механизма очистки – это критически важный этап в разработке робота. Существует множество различных методов очистки, каждый из которых имеет свои преимущества и недостатки. Простейший вариант – это фильтрация, когда робот просто собирает мусор и другие крупные загрязнения. Но для удаления растворенных в воде загрязнителей требуются более сложные методы, такие как адсорбция, коагуляция или биоремедиация.
Мы экспериментировали с различными типами фильтров – от механических фильтров до мембранных фильтров. Мембранные фильтры, такие как ультрафильтрация и обратный осмос, позволяют удалять даже самые мелкие загрязнители, но они требуют значительных энергозатрат. Биоремедиация – это использование микроорганизмов для разложения загрязняющих веществ. Это более экологичный метод, но он требует тщательного контроля условий, чтобы микроорганизмы могли эффективно выполнять свою работу. В одном из проектов мы пытались использовать робота для распространения бактерий, способных разлагать нефтепродукты, но столкнулись с проблемой их выживаемости в условиях водной среды. В итоге, нам пришлось разрабатывать специальные защитные капсулы, которые обеспечивали бактериям оптимальные условия для роста и размножения.
Навигация и управление: автономность и гибкость
Автономная навигация – это необходимый элемент любого современного робота для очистки водных объектов. Робот должен уметь самостоятельно ориентироваться в пространстве, избегать препятствий и находить оптимальный путь к месту загрязнения. Для этого используются различные системы навигации – GPS, лидары, камеры. Но ни одна из этих систем не идеальна. GPS не работает в закрытых помещениях или под водой, лидары могут быть чувствительны к погодным условиям, а камеры требуют обработки больших объемов данных.
Мы разрабатываем гибридные системы навигации, которые объединяют различные сенсоры и алгоритмы. Например, мы используем комбинацию лидара и камеры для создания 3D-карты водоема, а затем используем алгоритм SLAM (Simultaneous Localization and Mapping) для определения местоположения робота и построения карты окружающего пространства. Система управления роботом должна быть гибкой и адаптивной, чтобы робот мог быстро реагировать на изменения в окружающей среде. Мы используем алгоритмы искусственного интеллекта для оптимизации управления роботом и повышения его эффективности.
ООО Чэнду Жундэ Электромеханическое Оборудование: опыт и инновации
ООО Чэнду Жундэ Электромеханическое Оборудование активно участвует в разработке и производстве решений для автоматизации процессов очистки водных объектов. Наша компания специализируется на комплексном подходе, учитывающем все аспекты – от разработки концепции до внедрения готового решения. Мы сотрудничаем с ведущими научными институтами и предприятиями, внедряя передовые технологии и постоянно совершенствуя наши продукты. Наш опыт позволяет нам предлагать клиентам эффективные и надежные решения, отвечающие самым высоким требованиям.
Мы имеем успешный опыт работы с различными типами водоемов – от прудов и озер до рек и промышленных водохранилищ. Мы разработали роботов для очистки сточных вод, прудов в парках и заповедниках, а также для мониторинга качества воды в реках. Наши роботы отличаются высокой автономностью, надежностью и энергоэффективностью. Мы постоянно работаем над улучшением наших продуктов и внедрением новых технологий.
Перспективы развития технологий
Технологии в области автоматизации процессов очистки водных объектов развиваются очень быстро. В будущем мы можем ожидать появления новых материалов, датчиков и алгоритмов, которые позволят создавать еще более эффективные и автономные роботы. Особое внимание будет уделяться развитию искусственного интеллекта и машинного обучения, которые позволят роботам самостоятельно принимать решения и адаптироваться к изменяющимся условиям.
Мы видим будущее в создании роя роботов, которые будут совместно работать над очисткой водоемов. Рой роботов сможет эффективно обследовать большие территории и удалять загрязнения в режиме реального времени. Это позволит значительно сократить время и затраты на очистку водоемов и сохранить здоровье нашей планеты. Наша компания стремится быть в авангарде этих инноваций, предлагая клиентам самые передовые решения в области **производства роботов для очистки водных объектов**.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
 Тип GCS шкаф для распределения питания с фиксированным интервалом
Тип GCS шкаф для распределения питания с фиксированным интервалом -
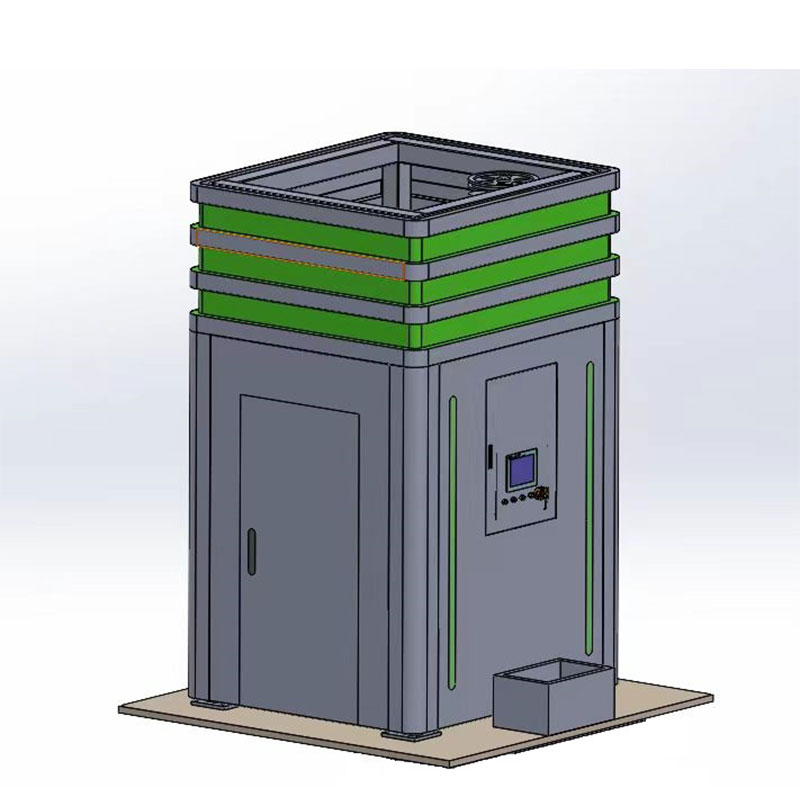
 Невесомые весы, различные разновидности пропорциональной системы распределения управления
Невесомые весы, различные разновидности пропорциональной системы распределения управления -
 Система дозирования на ленточных весах
Система дозирования на ленточных весах -
 Шкаф управления преобразованием частоты
Шкаф управления преобразованием частоты -
 Робот-уборщик AUTO MAN-PSI типа
Робот-уборщик AUTO MAN-PSI типа -
 Клапан
Клапан -
 Робот-уборщик AUTOMAN MAN-PSIII типа
Робот-уборщик AUTOMAN MAN-PSIII типа -
 Единая система дозирования для уменьшения накипи
Единая система дозирования для уменьшения накипи -
 Упаковочная машина для одиночных дозирующих бочек
Упаковочная машина для одиночных дозирующих бочек -
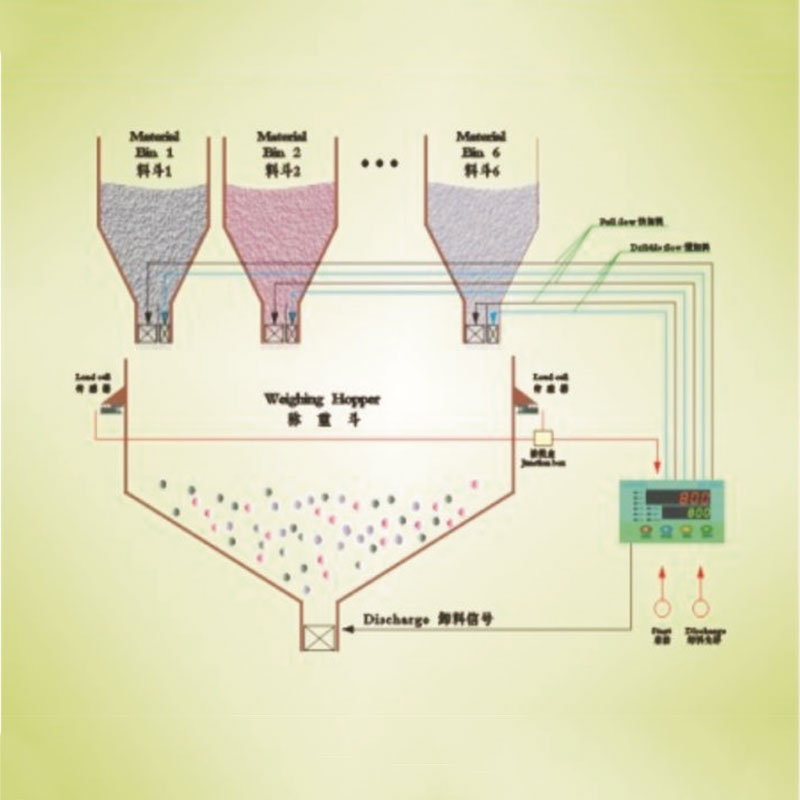
 Тензодатчик
Тензодатчик -
 Одномасштабная система дозирования одного сорта
Одномасштабная система дозирования одного сорта -
 Манометр
Манометр
Связанный поиск
Связанный поиск- Высококачественные производители регулирующих клапанов с электроприводом
- Прецизионная система дозирования пак в китае
- Высококачественная очистка родильной плотины вторичного отстойника
- Высококачественные автоматические упаковочные машины
- Высококачественные контроллеры взвешивания
- Производитель высококачественных роботизированных линий паллетирования
- Производители систем управления автоматикой
- Поставщики 1.4 преобразователя давления из китая
- Производитель центральных систем управления в китае
- Производитель программного обеспечения для платформ удаленного сбора данных